Today Big Idea Challenge powers orbital data center development As commercial interest in space-based data centers grows, University of Arizona researchers are combining their expertise to propel sustainable, high-performance computing beyond Earth's atmosphere.
Today Díaz de la Rubia named National Academy of Inventors fellow The University of Arizona's senior vice president for research and partnerships joins an elite class of American inventors.
Dec. 11, 2025 U of A researchers accelerate quantum computing at $125M center College of Engineering researchers will play a key role in developing quantum technology to advance solutions in machine learning, drug development, data storage, agriculture and cybersecurity.
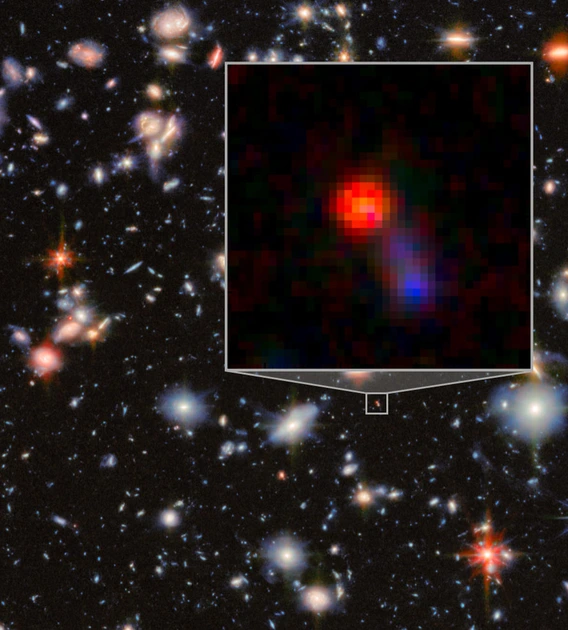
Dec. 10, 2025 The monster hiding in plain sight: JWST reveals cosmic shapeshifter in the early universe University of Arizona astronomers discover a galaxy with a dual personality – appearing ordinary in visible light while harboring an extraordinarily massive black hole.
Dec. 9, 2025 From Easter Island to your computer: U of A archaeologist helps create digital 3D model to view iconic statues The model is part of a host of new research that Terry Hunt, a U of A professor of anthropology, has completed from the island, known locally as Rapa Nui, this fall.
Dec. 8, 2025 No. 17 Arizona selected to face SMU in Holiday Bowl The Arizona Wildcats will square off against the Southern Methodist University Mustangs in the 46th annual Holiday Bowl on Jan. 2.
Dec. 8, 2025 New research links health impacts related to 'forever chemicals' to billions in economic losses A University of Arizona study finds that PFAS contamination imposes annual social costs of at least $8 billion.
Dec. 4, 2025 A new look at TRAPPIST-1e, an Earth-sized, habitable-zone exoplanet Recently reported methane signatures detected by the James Webb Space Telescope could be a hint to it potentially harboring life, but University of Arizona researcher Sukrit Ranjan urges caution.
Dec. 4, 2025 U of A College of Medicine – Phoenix and Onvida Health announce groundbreaking rural health partnership The University of Arizona College of Medicine – Phoenix and Onvida Health are partnering to launch Arizona's first rural regional medical school branch.
Dec. 3, 2025 A November to remember: Arizona Athletics sets new standard for success Arizona Athletics delivered major victories on the field, on the court and in the classroom throughout the month of November.